Home




What I Do
I have hands-on experience across multiple layers of robotic systems:
- Mechanical — end effectors, compliance mechanisms, DFMA
- Electronics — custom PCBs, sensor fusion, motor control
- Embedded — Teensy, ESP32, serial protocols, real-time control
- Software — ROS2, PySide6/Qt, Python, C++
- Intelligence — LLM-driven architectures, adaptive systems
Currently at C3 Construction Robotics in Hong Kong, working on autonomous robotic systems for industrial surface treatment. My role spans mechanical design, embedded systems, controls, and operator-facing software.
Featured Projects
Adaptive AI Study Coach
LLM-based study coach with adaptive review, a Discord and browser interface, and a knowledge graph built around prompt-driven teaching logic.
Autonomous Suspended Painting Robot
Suspended robot development spanning mechanical design, ROS2 controls, and operator tooling for a field-deployed coating system.
Cable-Suspended Robot for Deep-Foundation Cleaning & Inspection
Patented cable-suspended robotic platform replacing manual methods for deep-foundation cleaning and inspection. Co-inventor, US Patent 12,398,527 B2.
Expandable-Wheelbase Mobile Robot
MSc project — a four-wheel independently-steered mobile platform with a linear extending mechanism for adjustable wheelbase and tilt control, completed in under 3 months from home during a void period.
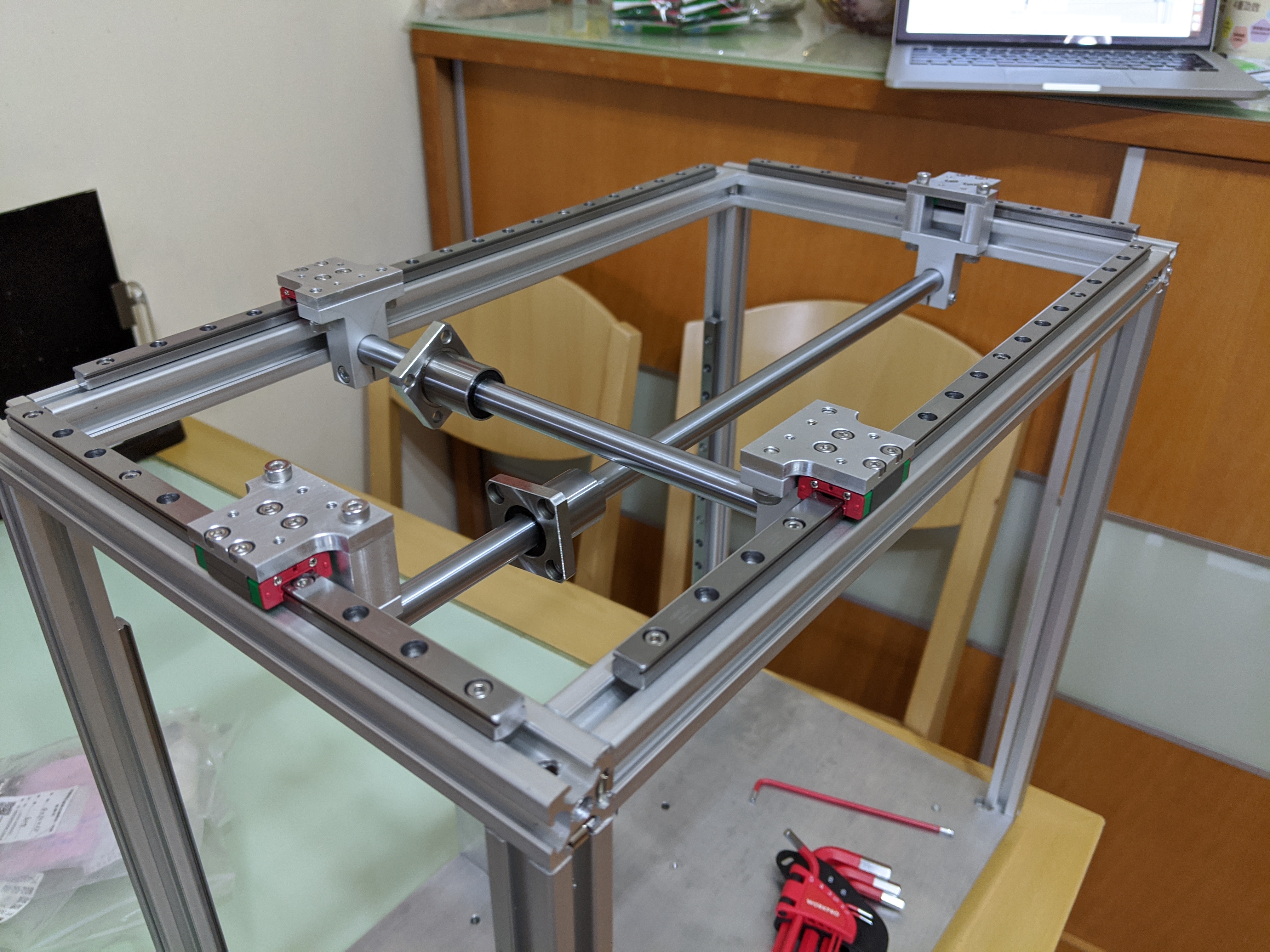
Custom-Designed FDM 3D Printer
Designed and built an FDM 3D printer from scratch — CAD, frame, electronics, and firmware. A personal project that kicked off my interest in building things beyond pure mechanical design.

Electric Vehicle Prototype
Undergraduate team EV prototype built to improve cornering with two active rear wheels, steering-angle sensing, and mechanically integrated vehicle redesign.