Overview
MSc Project, CUHK, 2021–2022
An MSc project at CUHK completed in under three months, entirely from home during a void period with no lab access. The 3D printer I built earlier turned out to be essential here.
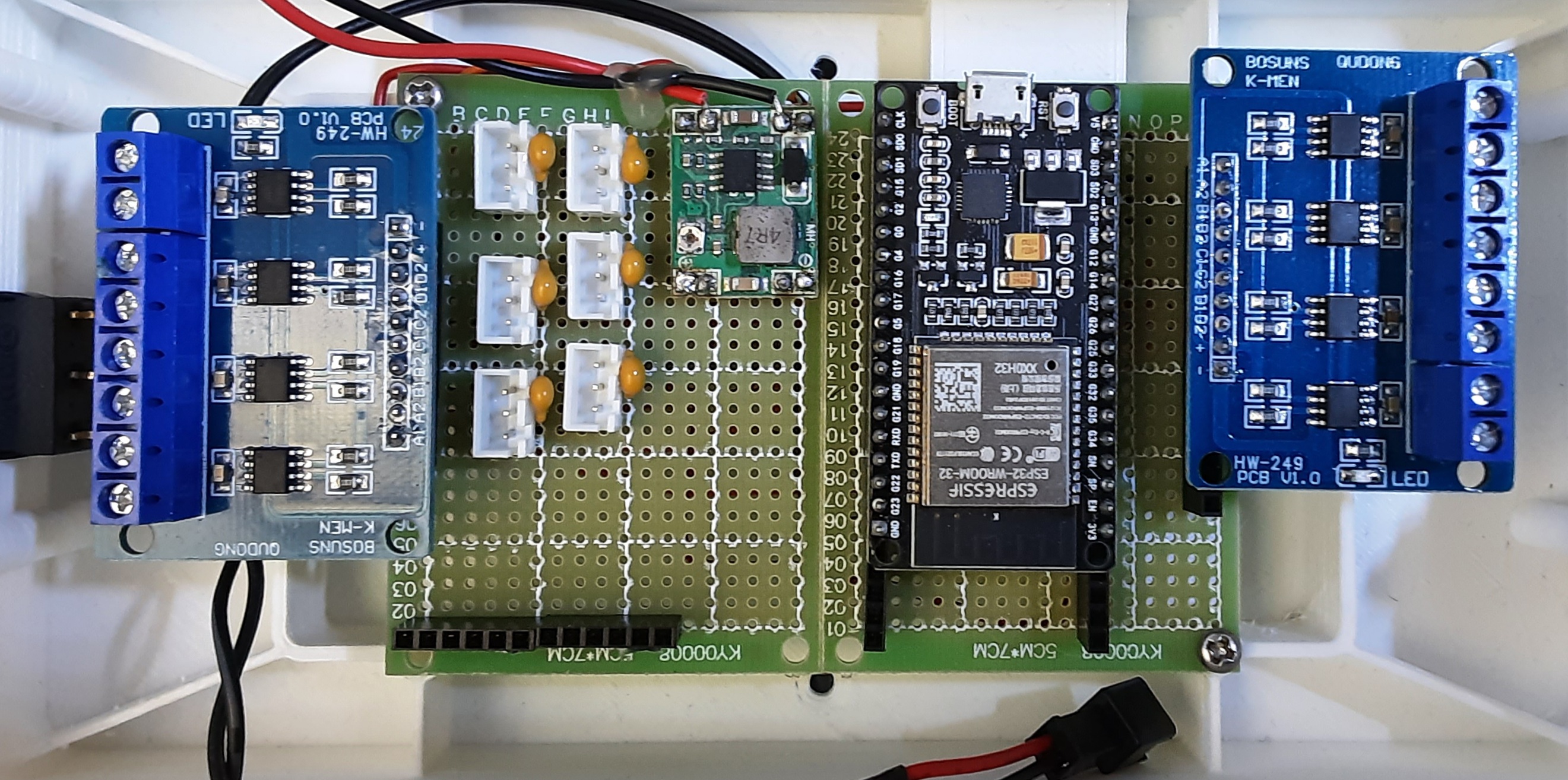
The idea: a four-wheel mobile robot where each wheel steers independently, and the wheelbase can physically extend outward. Squeeze through a narrow gap, then widen out for stability on the other side. The extension mechanism is angled, so pushing the wheels out also tilts the platform — one actuator, two degrees of freedom. I did the kinematics in MATLAB and ran the whole thing on an ESP32 with FreeRTOS.
This was my first real embedded project. Before this I’d only done mechanical design. Figuring out FreeRTOS task scheduling while also trying to get four wheels to agree on a direction was a steep but useful learning curve.
Technologies
ESP32 · FreeRTOS · SolidWorks · MATLAB · Kinematics · Prototyping
Gallery